GFM flood mapping algorithm 2, which was developed by DLR, is a fuzzy logic-based water class membership assignment, which includes an unsupervised initialization of the classification by tile-based thresholding, and post-classification refinement using a fuzzy logic-based approach (Martinis et al. 2015; Twele et al., 2016). The DLR algorithm requires a full Sentinel-1 scene as the main input and further exploits three ancillary raster datasets: a digital elevation model (DEM), areas not prone to flooding and reference water.
For the unsupervised initialization of the flood and water extent classification, the DLR algorithm applies a parametric hierarchical tile-based thresholding procedure, by labelling all pixels with a backscatter value lower than a threshold to the class “water”. The threshold value is automatically computed for a smaller, limited number of subsets (tiles) of the SAR scene, and applied to the entire scene. The tiles used to define the threshold are selected for based on their backscatter values, based on the assumption that tiles with a low mean backscatter and a high standard deviation show a bi-modal backscatter distribution, and are likely to contain both water and non-water features. Details on the algorithm are provided by Martinis et al. (2015) and Twele et al. (2016).
In order to exclude water look-alikes and to reduce under-estimations from the initial classification, a fuzzy set is constructed consisting of four elements: SAR backscatter coefficient (σ0); elevation; slope; and the size of water bodies. The degree of an element’s membership to the class water is determined by the simple Standard S and Z fuzzy membership functions whose values are real numbers in the interval [0, 1] (Pulvirenti et al., 2011).
The fuzzy logic-based post-classification, which is used for improving the initial classification of the DLR flood mapping algorithm, is illustrated in the figure below. As can be seen, for each membership function, the membership degree strongly depends on the position of the crossover point xc (i.e. half the width of the fuzzy curve), which is defined by the fuzzy thresholds x1 and x2. The fuzzy threshold values for each element are either determined according to statistical computations or are set empirically. As is illustrated in the figure below, the four elements which comprise the fuzzy set are defined as follows:
- The standard Z function is used for describing the membership degree to open water areas according to the radar backscatter.
- Digital elevation data are used to improve the classification through simple hydrological assumptions, i.e., by reducing the membership degree of an image element depending on the height above the main water area, by applying the standard Z membership function. Using this fuzzy set (not shown in the figure), the number of look-alike areas in regions significantly higher in elevation than the mean of the water areas is reduced, e.g. in mountainous terrain.
- Topographic slope information derived from globally available digital elevation data is integrated by using the Z membership function. Using this auxiliary information layer, water look-alikes in areas of steep terrain are removed.
- The S membership function is applied to the size of the water bodies to reduce the number of dispersed small areas of low backscatter, which are commonly related to water look-alike areas.
The corresponding fuzzy elements are combined into one composite fuzzy set by computing the average of the membership degrees of each pixel. If one single fuzzy element has a membership of zero, also the membership degree of the composite fuzzy set is set to zero.
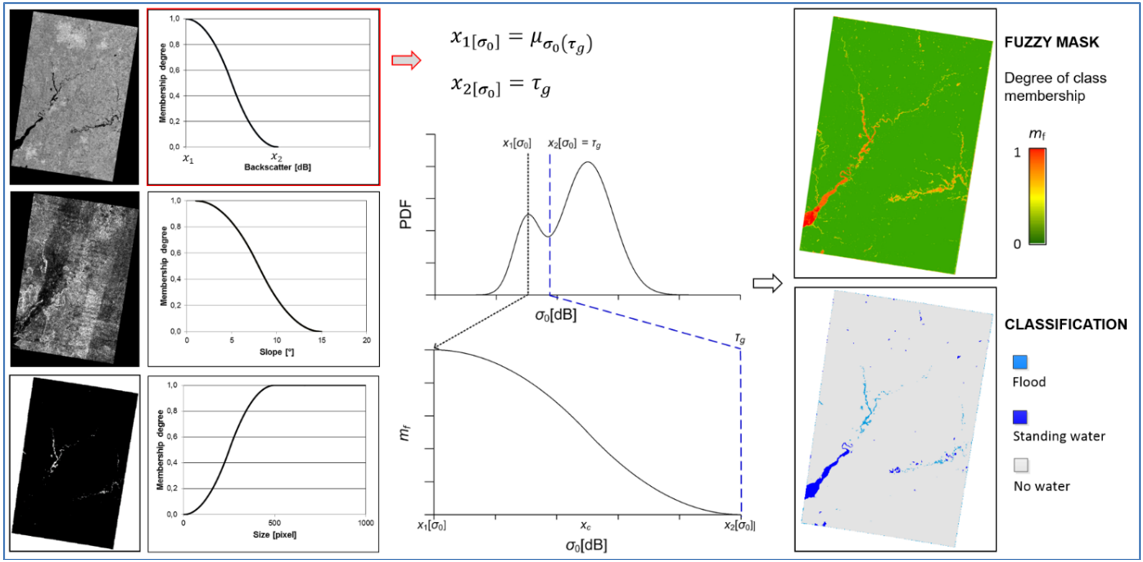
The flood mask is then created through a threshold defuzzification step, which transforms each image element with a membership degree >0.6 into a “crisp” value (i.e. a discrete thematic class). In order to integrate the transient shallow water zone between open flood water and non-flooded surfaces, and to increase the spatial homogeneity of the detected flood plain, a region-growing step is performed, whereby the preliminary extracted water bodies of the defuzzified classification are progressively enlarged until a tolerance criterion is reached. A relaxed fuzzy threshold with a membership degree of >0.45 is used as a region-growing tolerance criterion, so that only image elements with a fuzzy membership degree between 0.45 and 0.6 neighbouring the class flood are considered. Uncertainty information is contained in the fuzzy mask over classified water pixels, with values ranging from 0 to 1.
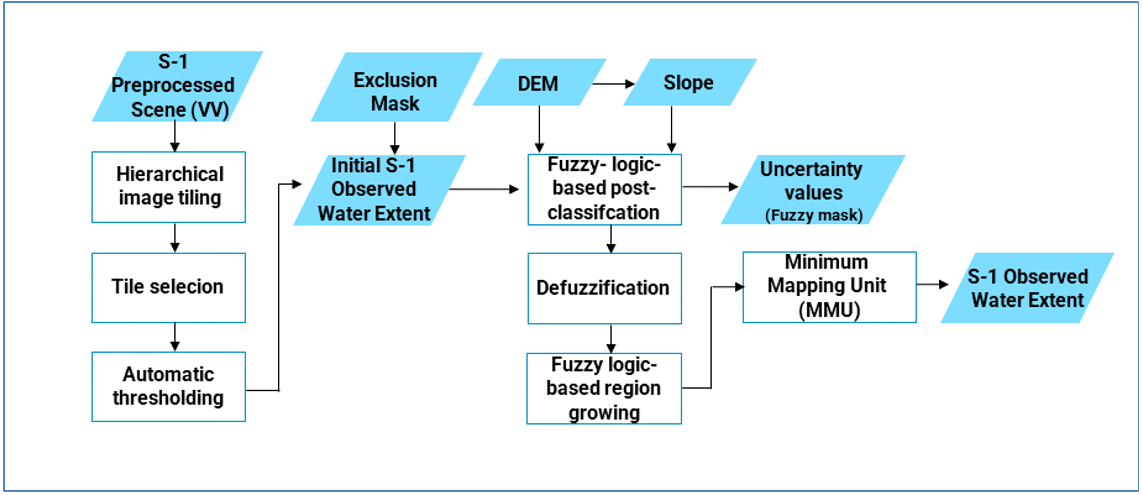
The data processing workflow of the DLR flood mapping algorithm is shown in the figure below.
In a nutshell
- The key strength of DLR flood mapping algorithm 2 is the automatic identification of flooded areas in the SAR data using a hierarchical tile-based thresholding approach and the optimization of the classification by combining various information sources using fuzzy-logic theory and region growing.
- Further details are provided in the dedicated section of the Product Description Document (PDD)