GFM flood mapping algorithm 3, which was developed by TU Wien, is a fully automatic, pixel-based methodology that exploits the entire historical time series of Sentinel-1 backscatter measurements over land (for all continents except Antarctica), which is contained in the Sentinel-1 “data cube” (i.e. spatio-temporal image stack) that is managed by the EODC (Wagner et al, 2021; Bauer-Marschallinger et al., 2022). The Sentinel-1 data cube is used to generate dedicated statistical parameters for each individual location on land, comprising the backscatter distributions of each grid-cell for non-flooded conditions, and for water bodies at various incidence angles. Based on these two distributions, the posterior probabilities of the values of an incoming Sentinel-1 image corresponding to the classes “flood” and “non-flood” can be calculated and used as input to Bayes decision rule to obtain the binary flood map.
The non-flood backscatter probability density function (PDF), which characterizes the normal (i.e. non-flooded) backscatter behaviour for each location, is modelled for each grid-cell as a normal distribution, by analysing the local historical backscatter response under normal conditions, and taking account of the seasonality (i.e. specific periodic, or harmonic, behaviour) exhibited by the local backscatter time series.
The flood backscatter PDF is also assumed to be a normal distribution, which is inferred from a representative collection of SAR measurements over water bodies, taking account of the effect on the backscatter coefficients of the local incidence angle of the radar beam (i.e. considering local slope and terrain). Both the non-flood and the flood PDFs are derived from the data cube separately for each Sentinel-1 orbit, due to the significant impacts on SAR backscatter of the nominal (versus local) incidence angle of the radar beam.
The TU Wien flood mapping algorithm takes as input the incoming Sentinel-1 SAR scene to be processed, a projected local incidence angle (PLIA) layer, and the corresponding parameters of the harmonic model. To classify a Sentinel-1 grid-cell as flooded or not, the posterior probabilities of the backscatter value belonging to “flood” and “non-flood”, is computed.
The maximum posterior probability is used to classify the pixel based on Bayes Decision Rule, where the uncertainty of the class assignment is given by the minimum posterior probability of the other class. With this approach, each pixel is assigned membership in a certain class, along with an uncertainty value ranging between 0 and 1. The uncertainty is minimized with improved separability between the two backscatter signature distributions and is higher where the distributions overlap. Consequently, pixels located along flood boundaries, where class assignment is generally more challenging, are associated with higher degrees of uncertainty. Finally, to convert the uncertainty values to percentages, the uncertainty values are linearly scaled to fall within the range of [0, 100].
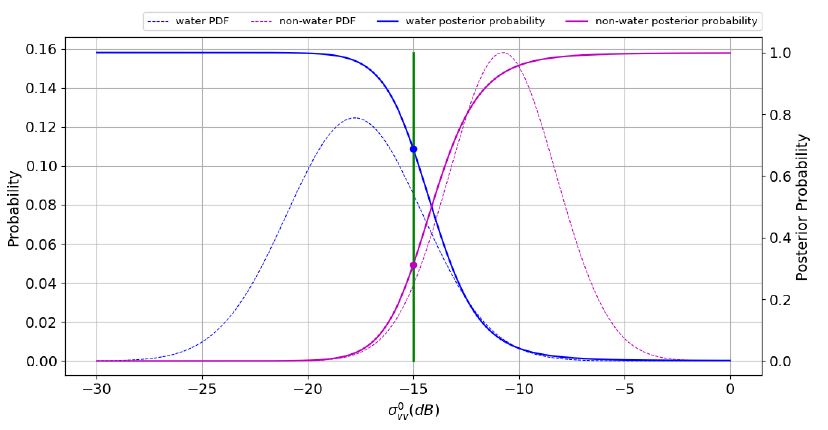
The classification method used by the TU Wien flood mapping algorithm is illustrated in the figure below: the backscatter measurement equals to -15dB, so the pixel is classified as water, since the posterior probability of water is larger than that of non-water. The uncertainty is then the posterior probability of non-water, reflecting the overlap of both PDFs.
The final part of the TU Wien flood-mapping algorithm is to post-process and mask the classification outcome of the Bayes Decision Rule. A small (3x3) spatial majority filter is applied to eliminate single pixels with a lower backscatter due to “noise”. The resulting flood map is masked on a pixel-basis for statistical ill-posed conditions, this includes areas where the two distributions are to close/similar, extreme outliers in the backscatter observations or the radar incidence angle, or when the Bases Decision is too uncertain (see Bauer-Marschallinger et al, 2022). Additionally, GFM Exclusion layers are then applied to the observed water map, in order to mask the following areas having an a priori low or zero probability of being flooded: radar shadows, no sensitivity, permanent low backscatter, elevated areas not prone to flooding (using a HAND index), and permanent and seasonal water bodies. This last step involves subtraction of the GFM Reference Water Mask from the generated and filtered water map to retrieve the final map of flooded areas.
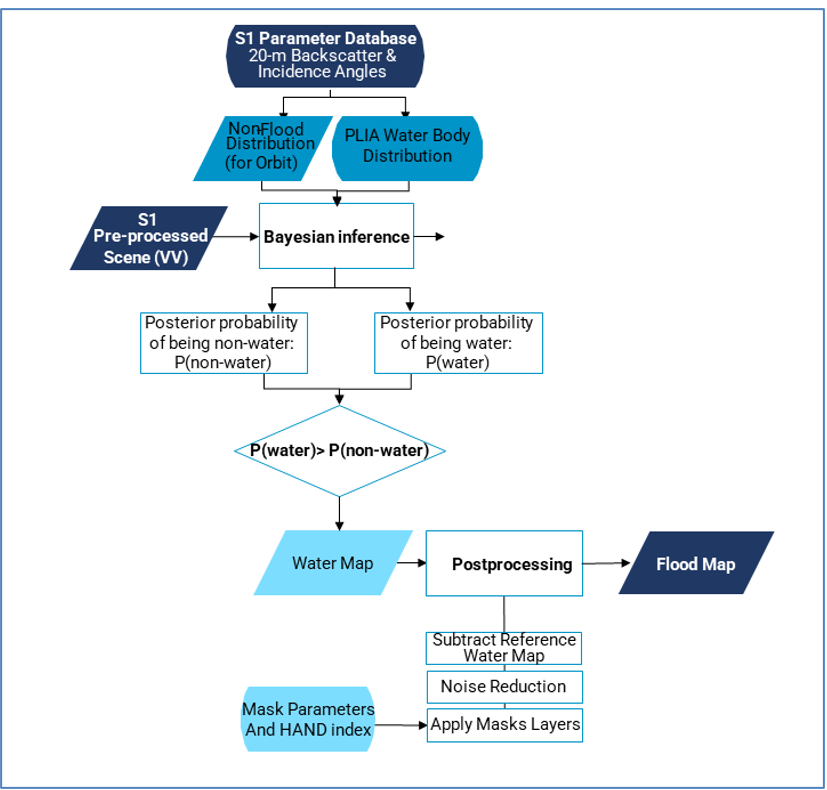
The data processing workflow for GFM flood mapping algorithm 3 (TU Wien) is illustrated in the figure below. Further details on the TU Wien algorithm are presented by Wagner et al. (2020) and Bauer-Marschallinger et al. (2022).
In a nutshell
- GFM flood mapping algorithm 3 (TU Wien) fully exploits the entire Sentinel-1 signal history within the data cube, realized by a set of a-priori computed statistical parameters layers that provide a highly accurate characterization of Earth’s land surface at pixel level, as well as of the incidence angle dependency in respect to the Sentinel-1 mission.
- With those parameters as input, and with the mathematical legacy of Bayes, the water delineation procedure can be computationally designed in a relatively efficient manner, and is hence most suitable for global operations in near real-time.
- Further details are provided in the dedicated section of the Product Description Document (PDD)